



Este post servirá como documentação de um projeto simples que esta se tornando complexo =D. Por envolver muitos conceitos diferentes vi a necessidade de documentar as etapas.
Tudo começou após a compra de Alumínio em chapa de largura 800mm e espessura de 0,5mm. A ideia era construir coisas sem precisar de impressora 3D. Então comecei com algo que fosse simples… fazer de Alumínio um robô bípede que eu já tinha impresso antes.

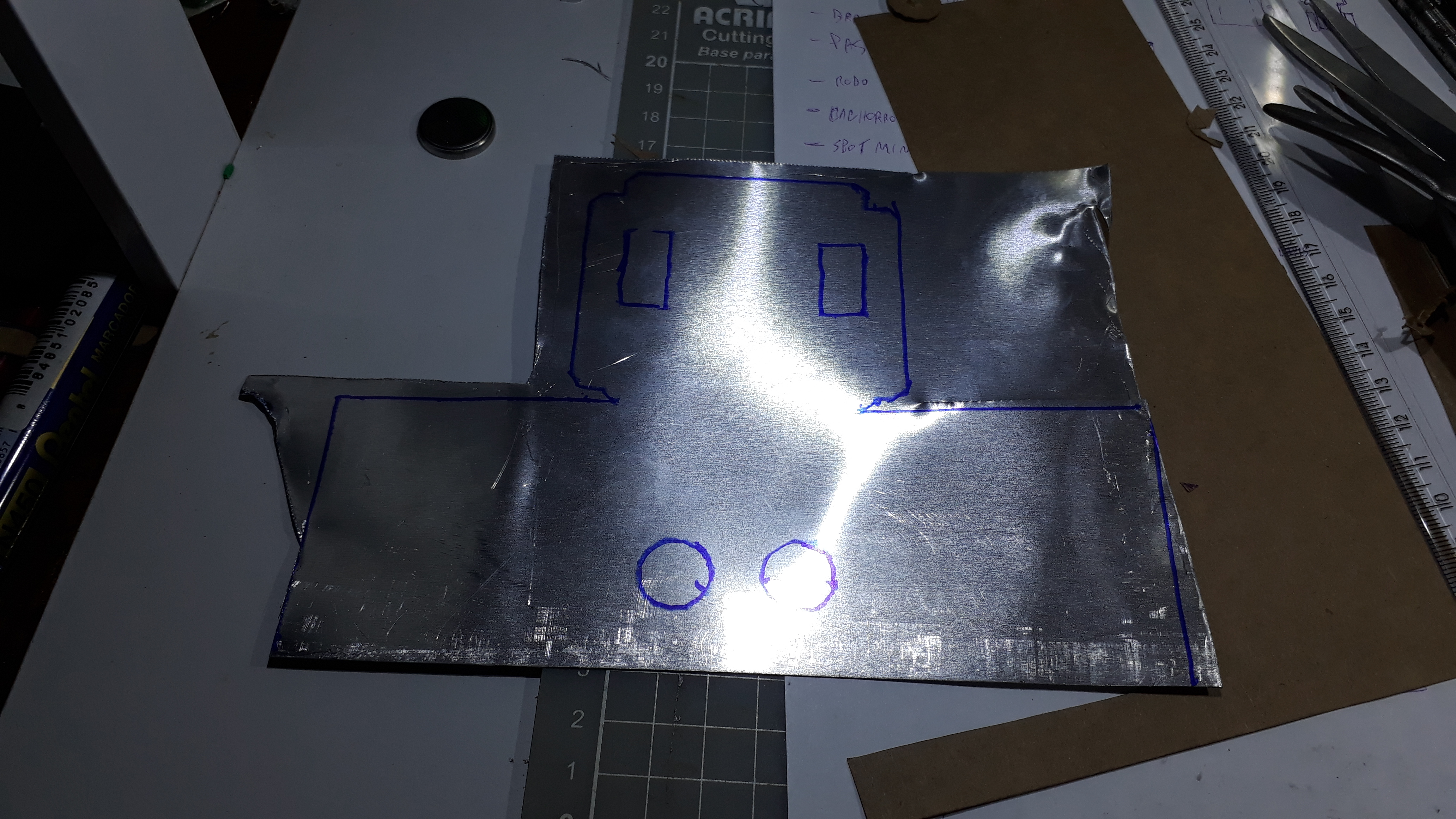
Então… comecei desenhando em um papel e depois fui para a chapa.

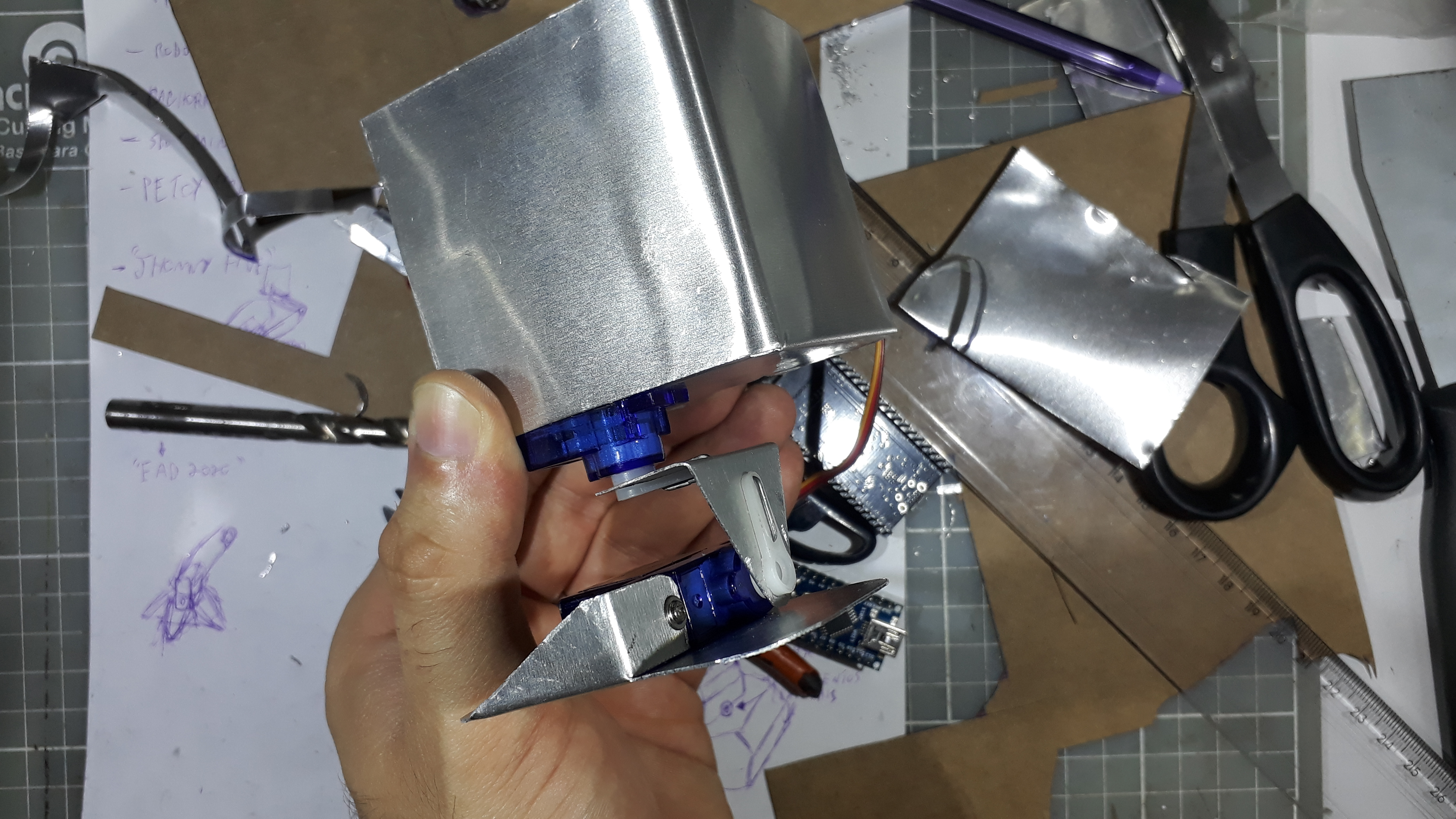
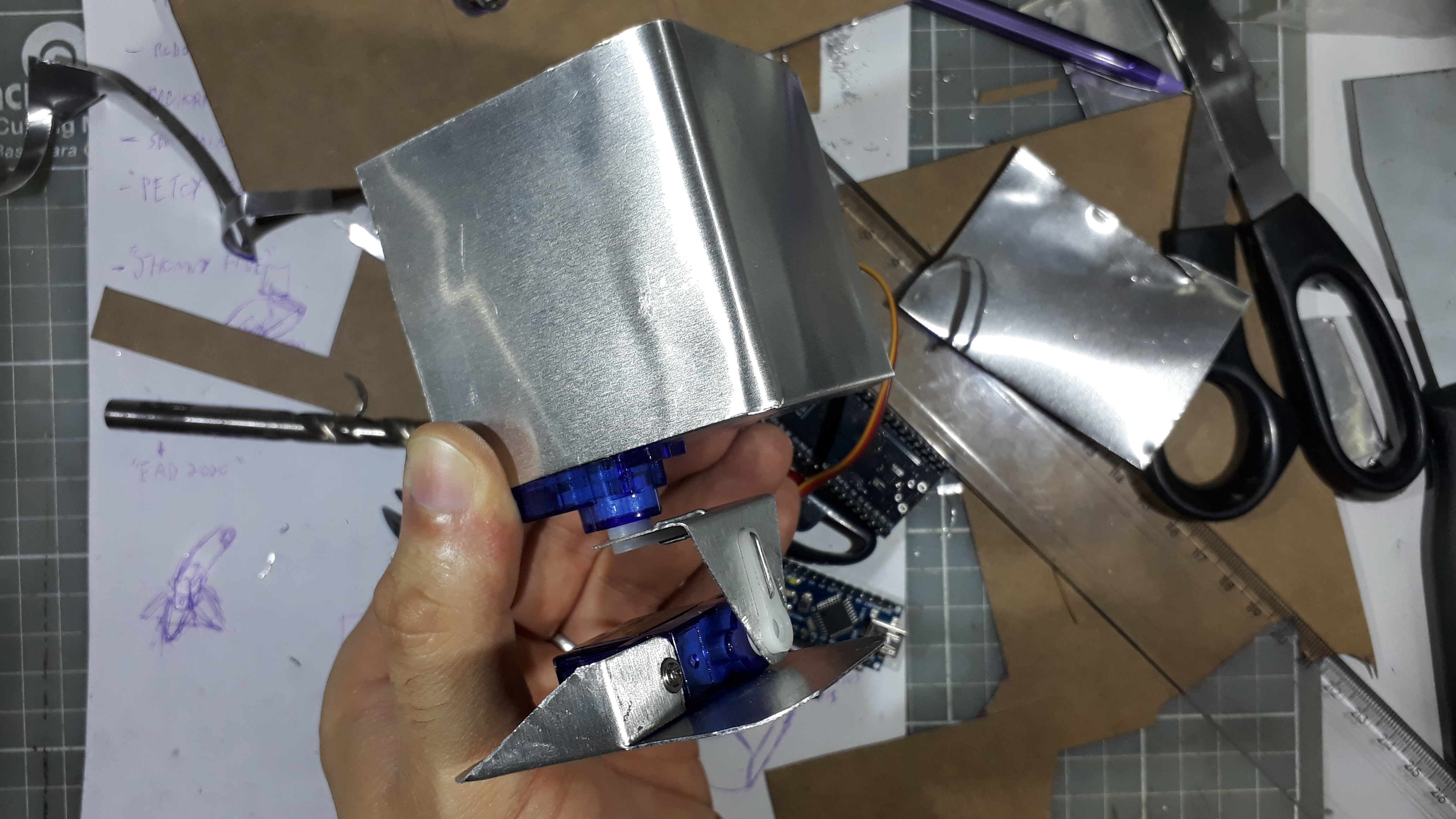


Servos usados são os HXT900, mas sg90 ou MG90 também servem… os braços dos servos foram fixados com o arame de clipes de papel. Após envio de fotos no Instagram @omecatronico.com.br … um seguidor sugeriu fazer o “bob esponja metal”. Comprei EVA e me aventurei para fazer a cobertura:

não é creme facial, é cola mesmo =) 




com direito a gravata
Acabou ficando com muito mais perfeição que eu imaginei =D
08/03/2021
Alto falante instalado na parte debaixo do bob. Testado com a risada do bob esponja
10/03/2021
Progresso com o código para reproduzir mp3 direto de um cartão micro SD através do microcontrolador ESP32. Biblioteca excelente utilizada foi a ESP8266Audio. Ela que permitiu este feito. Também possui suporte a outros formatos de áudio e locais de armazenamento. Agora falta mixar com o algoritmo para um AP e webServer e com isso poder controlar pelo navegador do celular os movimentos e sons reproduzidos.
Vídeo com a montagem e teste do alto falante:
Até o momento o Hardware utilizado é:
- ESP32 DEV KIT V1
- Leitor de cartão microSD
- 1 transistor npn com resistor ligado na saída DAC do ESP32
- pequeno alto falante 8ohms e 2w (retirado de sucata de televisão)
20/03/2021
Progressos no software… agora possui paginas HTML no SD card e audio! Com interface ainda em construção… já é possível tudo pelo navegador ( do computador ou celular) enviar, listar, tocar e deletar os arquivos de som mp3.
13/06/2021
Após muito tempo com projeto parado… a interface web praticamente está pronta. A tela “Control” lista na primeira coluna todos os motions(movimento e audio sincronizados) e na segunda coluna todos os audios disponíveis. Ao clicar em qualquer um o mesmo será executado.

Tela Audio serve para listar, enviar ou apagar audios do microSD do robô.

Tela Motion é onde se cria, apaga ou edita os Movimentos sincronizados com áudio. Aqui cada Linha é um frame de destino para as posições do servo e simultaneamente pode tocar um áudio.

Ao criar ou abrir um arquivo teremos:
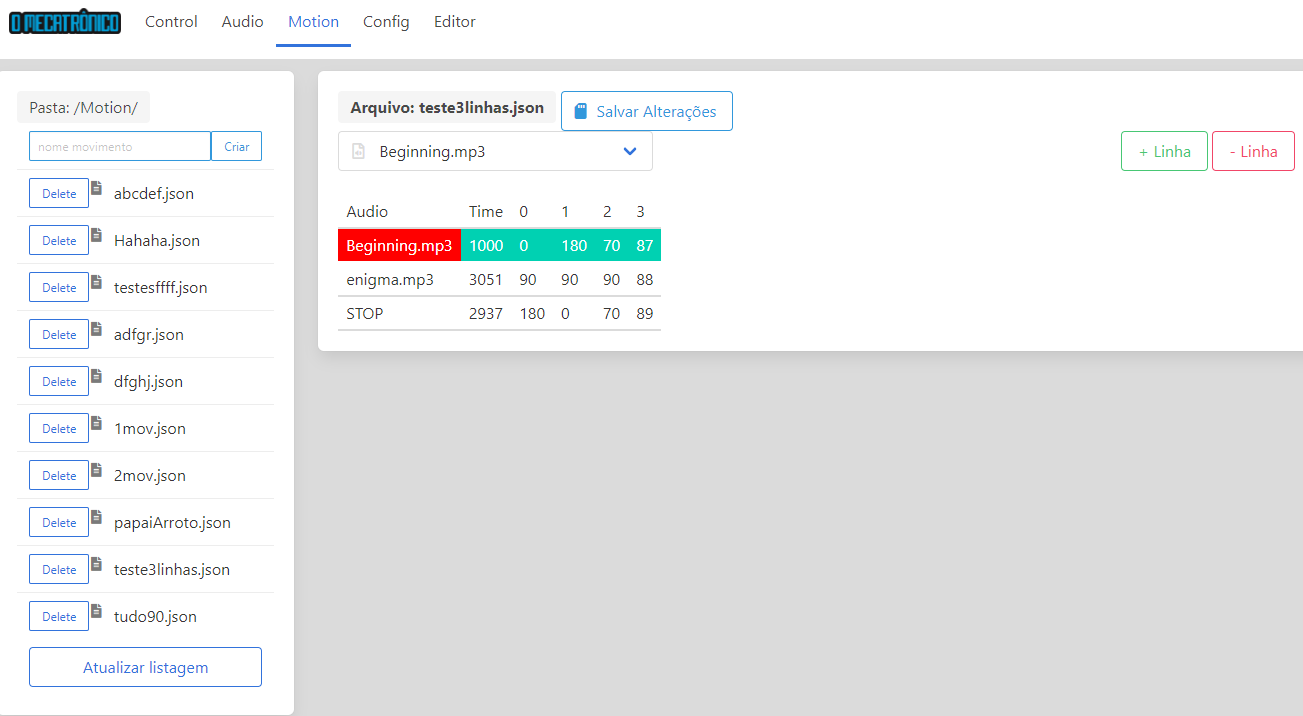
17/06/2021
Terminando o código (firmware) do ESP32 na plataforma Arduino para receber o comando play motion e fazer a extração de frame a frame do JSON e calcular posição de cada junta do robô fazendo interpolação de movimento. Dessa forma existe um movimento suave entre os frames. Não usei a biblioteca da Arduinojson.org pois a mesma exige que se tenha ideia do tamanho do JSON para fazer “desserialização”. Como o tamanho nesse caso é variável… não queria limites. Então fiz usando comandos padrão das próprias bibliotecas de “SDcard” e manipulação de “String”. Agora o “motion” pode possuir qualquer tamanho (ate o limite do cartão xD )que a memoria consumida é mínima e constante.
Vini Boy
Very good my friend